-
 Neuroengineering
Neuroengineering
-
 Human
Human
-
 Grade 4+
Grade 4+



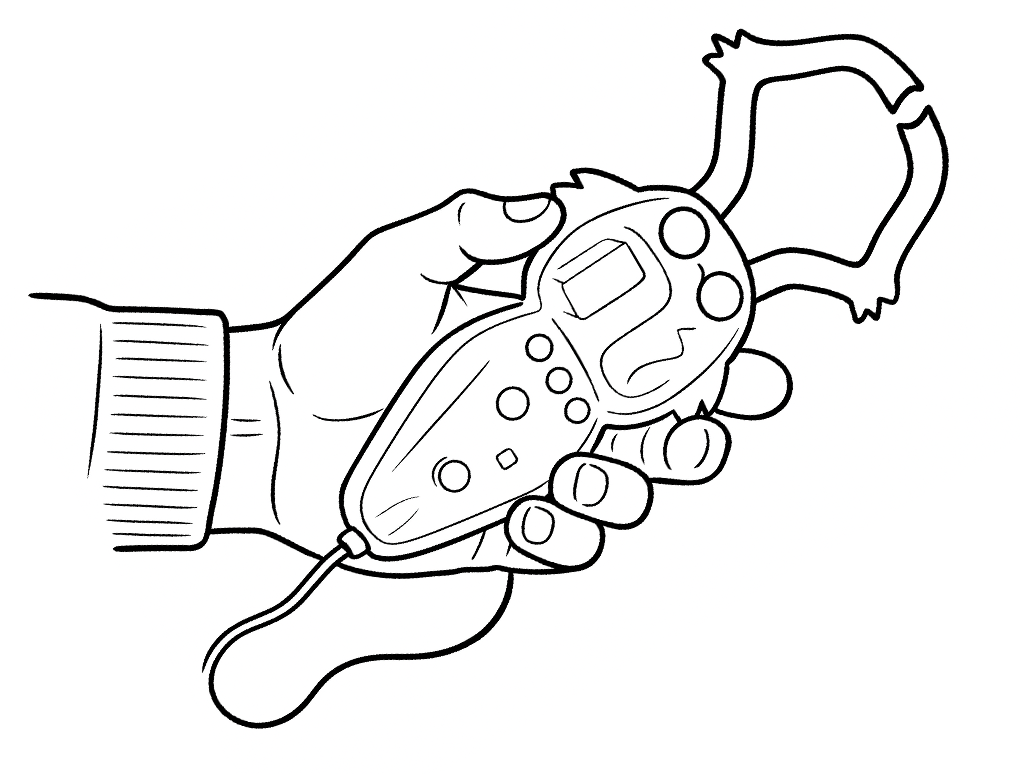
Control a Claw Neuroprosthetic
Use the electrical signals in your forearm to command a robotic gripper. You’ll place EMG electrodes, stream muscle activity to The Claw, and stack cups into a tower—an eye-opening intro to modern neuroprosthetics.
About experiment

What Will You Learn?
- How to place neuromuscular electrodes and record EMG.
- Core ideas behind brain–machine interfaces and neuroprosthetics.
- Fine-motor control using real-time muscle feedback.
- Hands-on robotic control driven entirely by EMG signals.

Background
Brain-machine interfaces translate natural bioelectric signals into movement commands for external devices. Prosthetic hands, for example, interpret residual muscle activity so users can grasp objects. In this challenge, your own forearm EMG will drive The Claw as you stack cups—showcasing how biology and engineering team up to restore dexterity.
Procedure
Set-up & First Test
Materials:
- The Claw with 9 V battery
- Human SpikerBox or EMG amplifier + electrode cable
- Three disposable EMG electrodes
- Six lightweight plastic cups
Steps:
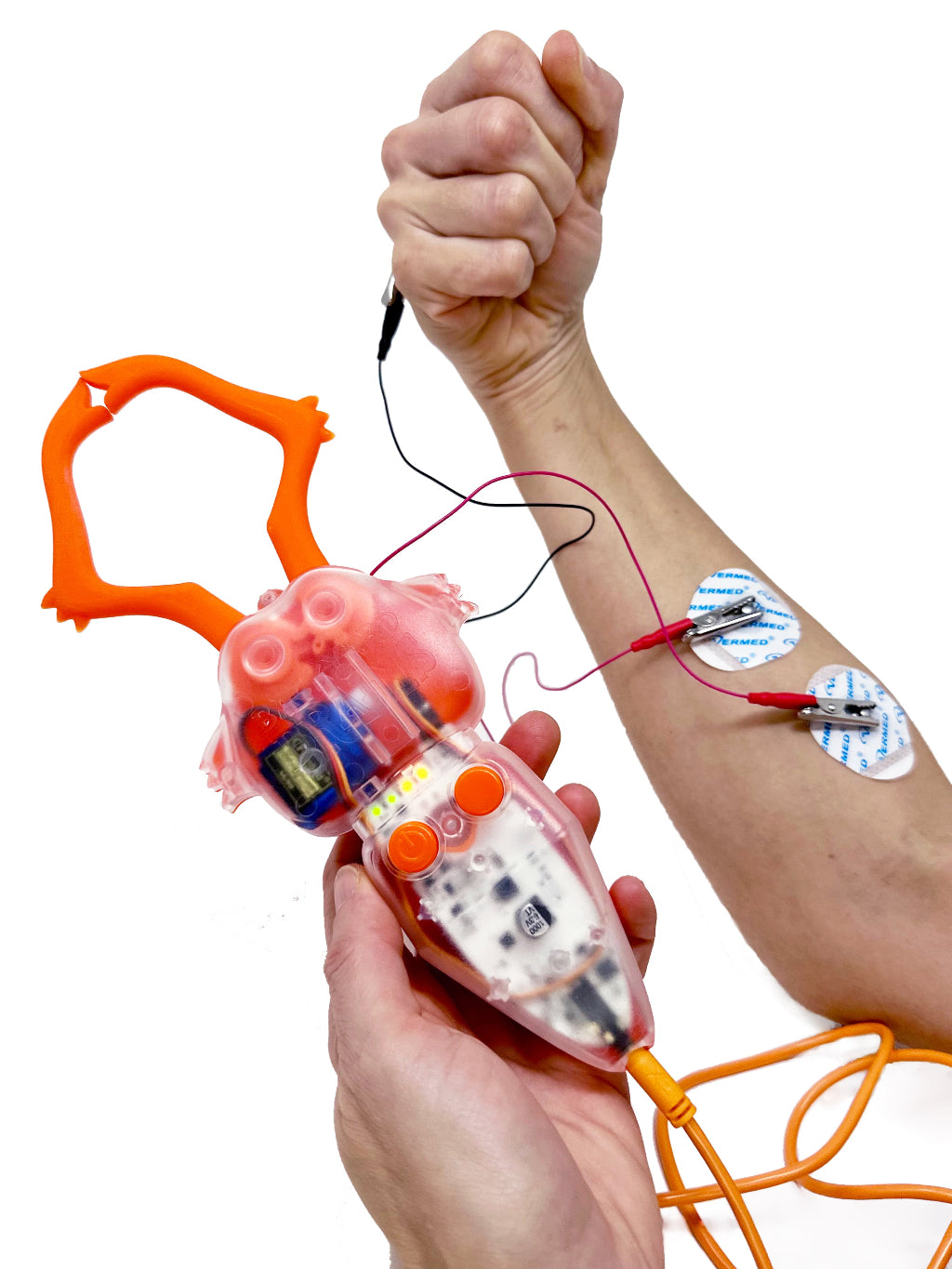
- Electrode placement —Apply two electrodes over your forearm flexor muscle and one on the back of your hand (ground). Clip the two red leads to the forearm electrodes and the black lead to ground.
- Power up —Insert a fresh battery, press the power button, then tap the mode button to set the pincer’s start position (open/closed).
- Test grip —Flex and relax to open/close The Claw. Adjust electrode positions until movement is smooth.
- Cup setup —Place six cups upside-down at the edge of your workspace; you’ll build a 3-2-1 pyramid in the center using only The Claw.
Gameplay & Rules
Cup Stacking
A) Stack the cups
• Do not reset the start position once play begins.
• If you knock cups over, pick them up only with The Claw.
• A cup that rolls out of reach ends the round.
• Build the 3-2-1 pyramid as fast as possible.
B) Dismantle the pyramid
• Return cups to their original stack—again using only The Claw.
• Race friends or try to beat your own best time.
C) Variations
• Move cups farther away or change angles.
• Try controlling The Claw with a different muscle (biceps vs. forearm).
• Introduce obstacles or heavier objects for an extra challenge.
Analysis & Troubleshooting

Results & Insights
Data to collect
• Time to build and dismantle the pyramid.
• Grip stability vs. flex strength.
• Muscle fatigue across repeated rounds.
Troubleshooting tips
• Weak or jittery motion? Check battery level and secure electrodes.
• Claw drifts on its own? Verify cable orientation and avoid electrical noise.
• LEDs on but no movement? Press the mode button or power-cycle.
These same principles underlie clinical BMIs that restore movement to people with limb loss or paralysis—your cup-stacking race uses the very tech driving tomorrow’s neuroprosthetics.